| Prev: CPPX Architecture | Table of Contents | Next: The Transformations |
There are some disadvantages to the representation. The first is that there is no support for variable length nodes, which are used in the GCC graph. Another disadvantage is that if a transform runs out of free nodes in the array, then a new array must be allocated and the contents copied (2 x memory). The last disadvantage we mention here is that 0 is a valid pointer value (the first node in the array) and thus the null pointer is -1.
The graph also contains an integral hash table to represent the string values in the program. Implemented as two arrays, the hash table is also trivial to read and write to disk. String values in the program are also represented as integer array indexes.
typedef struct {
/* string table stuff */
unsigned long stringBuffLen;
unsigned long curStringPos;
char * stringBuffer;
/* hash table */
/* hash table only stores location in string
* table. Therefore, no need for a complex structure
*/
unsigned long hashTableLen;
long *hashTable;
/* node table */
unsigned long nodeBuffLen;
unsigned long curNodePos;
node_ptr firstNode;
gd_graph_node * nodeBuffer;
} gd_graph;
The graph is represented as three arrays, implented as three pointers and unsigned long length fields in the main structure. The first of these arrays is the string buffer (stringBuffer and stringBuffLen). This array is used to store the contents of any strings in the program graph. Each string is stored once in the table, terminated by the null character. The strings are referred to in graph by the index of the first character of the string. This reduces string comparisons to a single integer comparison of the index of the string in the array. An extra index in the main structure keeps track of the first unallocated character in the array. Currently no garbage collection is performed on this array. Once a string is stored in the array, it is never removed.
The second array is the hash table. The hash table is mostly used when constructing the graph, and only occasionally during the transforms. The graph nodes point directly to the string buffer. The hash table is used to elimnate duplicate strings and to find the index of a string from its contents. For example, to find a node with the name "void", a hash table lookup will return the index of the string "void" in the string buffer, and and instances of void in the graph will have that index. If the lookup returns -1, then the string void is not in the string buffer, and thus is not in the graph.
The last array is the array of nodes. As with the string buffer, there is an extra index that indicates the limit of used nodes in the array. Unlike the string buffer, garbage collection of nodes is performed (by gd_filter) and there may be free nodes within the allocated part of the array. There is also an extra index that indicates the root of the graph (points to the global namespace in the graph).
There is some subtyping in both the GCC and the Datrix node types. For example, a type declaration is a declaration which is a GCC node. This is implemented in the GD structure using nesting and overlyaing of the structures. A subclass is implemented by declaring the first field of the structure as the type of the superclass. For example, part of the declaraion of gd_graph_node is:
typedef union {
gd_graph_common common;
...
t_gcc_decl
decl;
t_namespace_decl namespace_decl;
...
} gd_graph_node;
All gd nodes are subclasses of gd_graph_common which defines fields common to all nodes. On of these fields is the field type which give the type of the node.. The structure t_gcc_decl defines the fields common to all gcc declaration nodes as represented in GD. GCC namespaces are represented using the structure t_namespace_decl. The last two structures are defined as:
typedef struct {
gd_graph_common common;
node_ptr name;
node_ptr mngl;
node_ptr type;
node_ptr chan;
node_ptr scpe;
str_ptr srcf;
int srcl;
src_lang lang;
int artificial;
} t_gcc_decl;
typedef struct {
t_gcc_decl decl;
node_ptr dcls; /* C++ only */
node_ptr alis; /* C++ only */
} t_namespace_decl;
All three types are defined in the main graph union (as shown above).
Thus the type field of a namespace_decl node may be refered to as:
thegraph.nodeBuffer[theNode].common.type
or
thegraph.nodeBuffer[theNode].decl.type
or
thegraph.nodeBuffer[theNode].namespace_decl.decl.type
Every node has gd_graph_common as the ultimate superclass, so the type of any node can always be detemined using first code version (thegraph.nodeBuffer[theNode].common.type).
One consequence of this representation is that there are no variable length nodes. Most places where GCC uses variable ength nodes are not exported as part of the GD representation. The one place where it matters is in the encoding of class inheritance. In this case the dumping routines change the tree vector representation into a linked list using tree_list nodes.
The gd_graph_common structurer is defined as follows:
typedef struct {
enum gd_node_type type:16;
/* bit fields for simple definitions */
unsigned unsigned_flag: 1; /* 17 */
unsigned constant_flag: 1; /* 18 */
unsigned static_flag: 1; /* 19 */
unsigned public_flag: 1; /* 20 */
unsigned private_flag: 1; /* 21 */
unsigned protected_flag:1; /* 22 */ /* 10 bits left */
/* for use of conversion algorithm */
unsigned mark_flag1: 1; /* 23 */ /* 9
bits left */
unsigned mark_flag2: 1; /* 24 */ /* 8
bits left */
node_ptr other_node;
} gd_graph_common;
The first part of the common structure is almost identical to the GCC common structure. The main difference is that the node type field has bee expanded to 16 bits. The next 6 flags are the same as the flags in the GCC common structure and when the GD graph is dumped by the modified compiler, they are copied directly from the GCC internal structure. The last three fields are for use in the conversion. The mark flags are used for mark and sweep algorithms in the transforms, and the other_node field is a generic node pointer whose purpose changes during the transform. For example, GCC represents blocks of declarations or statments with a single edge to the first of the block, and using one field in each declaration or statement to build a linked list of the statements or declarations in the block. The Datrix model uses multiple edges. In the intermediate stage, a datrix node needs a next pointer when it is embedded in a GCC list that has not been converted yet. The other_node is used for that purpose in this case.
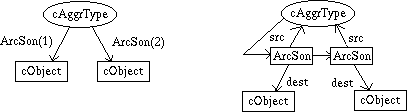
GCC edges were represented as pointers in the original internal graph and are represented as node_ptr fields (contain array indexes). That is the edges in the GCC graph are implemented as a reference from one GD node to another. Datrix edges may carry attributes and in addition, a given node may use the same relation (edge) to refer to more than one node. For example, the ArcSon edge is used to link the node representing a structure to the nodes representing each of the members (field and methods). We use gd_graph_nodes to represent Datrix edges. The nodes represenging datrix edges have a source and dest pointers in the node. Any attributes are fields of these nodes. When traversing the graph, we need a quick way to find the edges associated with a given node. Therefore the src node has a field pointing to the first of the edges, and the nodes representing the edge have next pointers linking them together. Figure 1 shows an example.
| Prev: CPPX Architecture | Table of Contents | Next: : The Transformations |